| Robot swarms take to the air |
| Saturday, 02 October 2010 | |||
|
Swarm intelligence is a popular AI topic at the moment but not many researchers go as far as building the real thing. This is not a simulation - watch the video. 
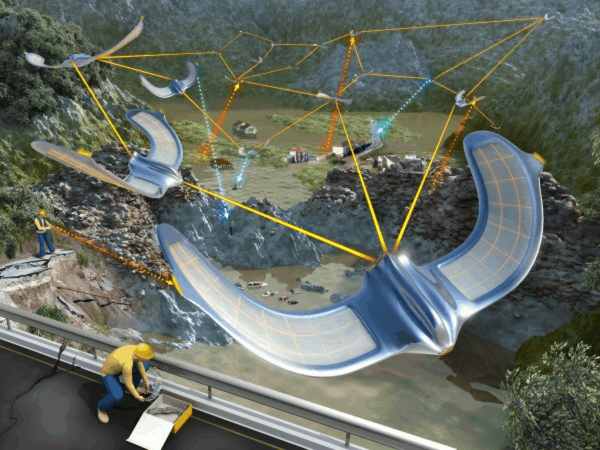
Swarms are collections of active agents that each operate according to simple rules. From the simple rules and the action of the number of entities comes swarm intelligence - with greater potential than the simple rules would suggest. The SMAVNET project is developing swarms of flying robots that can be deployed in disaster areas to create communication networks for rescuers.
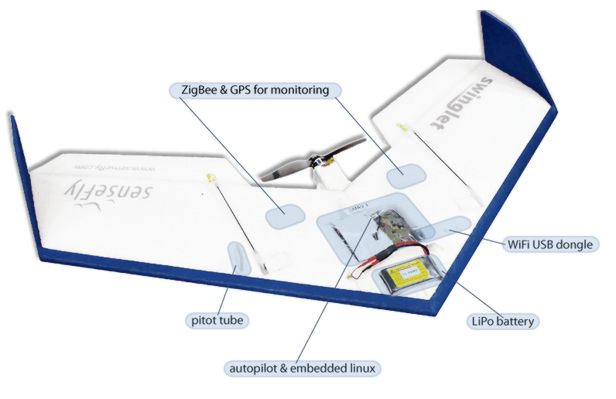
Each of the planes are light weight (420 g, 80 cm wingspan) and built out of Expanded Polypropylene (EPP) with an electric motor mounted at the back and two control surfaces serving as elevons (combined ailerons and elevator). The planes are sufficiently light and slow moving to reduce the impact risk to humans on the ground. The research team have clearance to fly the swarm out of line of sight. Each robot runs on a LiPo (Lithium Polymer) battery which provides 30 mins of flight. They are equipped with an autopilot for the control of altitude, airspeed and turn rate. Embedded in the autopilot is a micro-controller that runs a minimalist control strategy based on input from only 3 sensors: one gyroscope and two pressure sensors.
Swarm controllers are implemented on a Toradex Colibri PXA270 CPU board running Linux, connected to an off-the-shelf USB WiFi dongle. The output of these controllers, namely a desired turn rate, speed or altitude, is sent as control command to the autopilot. In order to log flight trajectories, the robot is further equipped with a u-blox LEA-5H GPS module and a ZigBee (XBee PRO) transmitter. The video shows a test flight and it all looks far to much fun to be classified as work!
The swarm algorithms being tested are biology based. The first is derived by reverse engineering a solution found using the genetic algorithm. The second is inspired by ant search optimisation techniques. Ants lay down pheromone tracks that become increasingly optimal as more and more ants follow them and lay down modified tracks. More information: http://lis.epfl.ch/?content=research/projects/SwarmingMAVs/
<ASIN:046501884X> <ASIN:0262062712> <ASIN:3642071171@COM> <ASIN:1615206663> <ASIN:1848211309> |
|||
| Last Updated ( Saturday, 02 October 2010 ) |