| Handy-Potter - Make Things By Waving Your Hands In The Air |
| Written by Harry Fairhead | |||
| Tuesday, 14 August 2012 | |||
|
It seems to be the season for new Kinect applications, all of which make you want to try them out. The latest is Handy-Potter, which you can use to create 3D objects simply by making their outline in the air. 3D input has always been a difficult problem. If you want to create a shape for manufacture by a 3D printer, say, then you have to learn to use a 3D CAD package and draw the object in great detail. This may be workable but it lacks the interactivity of other methods of 3D creation - molding clay or throwing a pot say. Why not use the same methods?
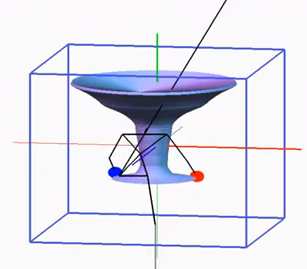
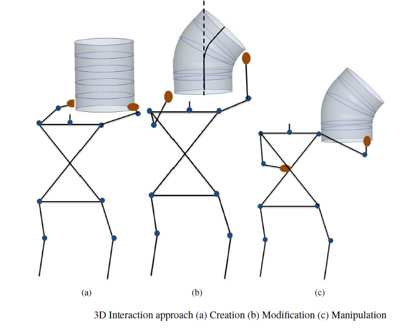
Kinect can tell where your hands are in space and so it is an easy next step to add a 3D object creation routine. You wave your hands in the air following the contour of the object you want to create and it appears on the screen as a rendered solid object. Watch the video to see it in action:
Its seems like a good idea, at least for getting a rough object into the CAD system for refinement. It's called Handy Potter because it converts the outline into a solid of rotation - just like a potter's wheel produces. The big difference is that you can specify how many times the outline is duplicated to create the solid. For example, duplicating it four times provides a rectangular cross section. It can also be used to deform the overall shape by "pushing" it so that the rotation axis is deformed. See the full paper for more details.
The restriction of symmetric objects is what makes it easy to use but, of course this is its limitation. It could be extended by other 3D operations, such as Boolean composition, general distortion and so on. These should be easy to add on to the basic application. The project was Winner of the “All-Conference Best paper of ASME IDETC/CIE 2012” award
More InformationHandy-Potter: Rapid 3d shape exploration through natural hand motions (pdf) Related ArticlesWant To Animate A Chair? Easy With Kinect Further Update for Kinect Developer Toolkit
Comments
or email your comment to: comments@i-programmer.info
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

|
|||
| Last Updated ( Tuesday, 14 August 2012 ) |