| Air Muscles Power Festo's Humanoid Robot |
| Written by Harry Fairhead | |||
| Saturday, 27 November 2010 | |||
|
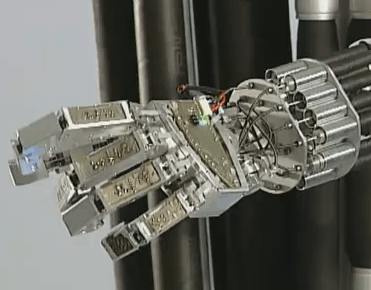
A new type of robot muscle has been used to create an amazingly dexterous robot. All we need now is the software. Watch the video and be impressed! While the mechanical side of robotics doesn't really qualify as AI as such, you have to admit that the hardware is important. In this case the breakthrough in creating a humanoid torso with amazingly dexterous fingers and hands is the use of a new type of pneumatic actuator.
The idea is that instead of piston driven actuators the pneumatic muscle works in roughly the same way as real biological muscle - but using air and engineering to create the shortening in length rather than chemical reactions. The principle is that short rubber tubes are wired directly to the part that they are intended to move. Inflating the tube causes it to shorten and so create a pulling force. Clearly the problem is that such a device cannot push but you can either use them in pairs or set one working against a passive tension device. Clearly the advantage is controllability and overall lightness and efficiency. The design is by Festo which is well known for its biologically-inspired technology.

|
|||
| Last Updated ( Sunday, 12 February 2023 ) |