| Dumb Robots V Smart Robots |
| Written by Mike James | |||
| Sunday, 10 March 2013 | |||
|
AirBurr is a dumb flying robot that manages to get from A to B as effectively as a smart robot. It does the trick by simply bouncing off objects, recovering and carrying on in the same general direction. Most programmers, if set the task of inventing some code that would get a flying robot from one place to another, would start to think about how to locate the robot in its environment, how to model the environment, what the best planning method was to get from A to B, how to recover from problems that might occur during the journey ... and so on.
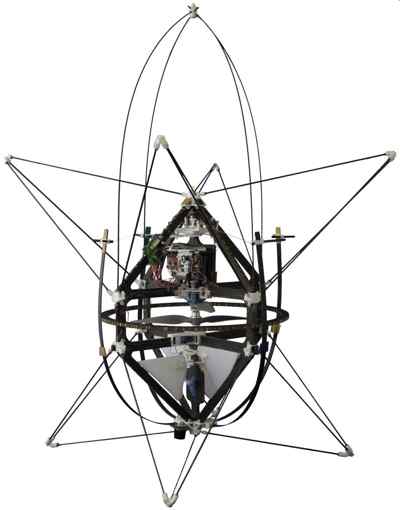
The AirBurr in action in a darkened room
A group at the Ecole Polytechnique Federale De Lausanne (EPFL) has taken a completely different route and decided to copy the way an insect often does the job. If you have ever watched a fly or a moth navigate towards an open window, say, you will have seen it bounce off obstacles and generally perform what looks like a random walk with a directional bias.
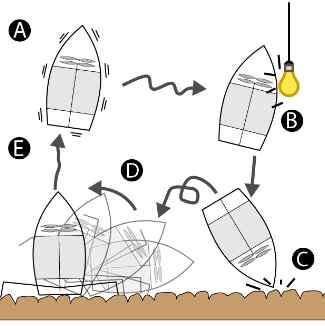
This is what AirBurr does, and it does it very well. A robust outer frame means that it can run into things and survive. Even though I refer to the robot as "dumb" it isn't entirely stupid. It makes use of a random directional algorithm much like a robot vacuum cleaner. It also has an active recovery system. If an impact makes it fall to the floor then a set of legs deploy to right it so that it can take off again. It also has optic flow sensors that can provide it with feedback on how fast it is traveling.
The advantages of the approach are quite interesting. Whereas a more sophisticated robot would need to employ sensors to work out where it is and where to go, AirBurr simply presses on with its journey even when it can't see. It can also "solve" the problem of chaotic environments, destroyed buildings for example, by simply ignoring the problem. In short, AirBurr makes a good exploration or search and rescue robot because it is simple and can traverse difficult environments.
Many times when I was working on an AI project I noticed that there was an easy but not very AI solution to the problem which involved a low tech approach. Usually I was told that this wasn't the sort of solution that the research group was looking for and to focus on the more advanced and "intelligent" solution. So AirBurr might be dumb, but the approach of the research team is smart. Now if only I can avoid the reflexive desire to swat it every time I see it flying....
More InformationThe AirBurr: A Flying Robot That Can Exploit Collisions Related ArticlesFlying Neural Net Avoids Obstacles
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Sunday, 10 March 2013 ) |