| Image deblurring using inertial measurement sensors |
| Sunday, 05 December 2010 |
|
Add position sensors to a camera and you never have to throw away a photo because it is blurred. Microsoft Research shows how it can be done and done better than existing methods - it also looks fun. 
Image deblurring has a long history involving signal processing, statistics, image processing, AI, inverse problems and so on. Today it's probably best regarded as part of the bigger subject of computational photography. The problem is simple to state. You have a photo that is blurred due to some defect in the system - out-of-focus, motion blur due to camera or due to subject etc. In principle, as long as you assume that there are no non-linear effects the problem is one of inverse filtering. Work out the point spread function of the distortion and apply the inverse filter by either Fourier methods or direct convolution. The big problem is, of course that you don't have the point spread function of the blurring. In theory you should be able to work it out by analysing known objects in the image - for example if you are lucky enough to have isolated star in the image then you have the blurrings point spread function and can undo the blur. Another problem is that software deblurring algorithms often remove blurring due to depth of field effects which might have been included in the picture as an "artistic" effect.
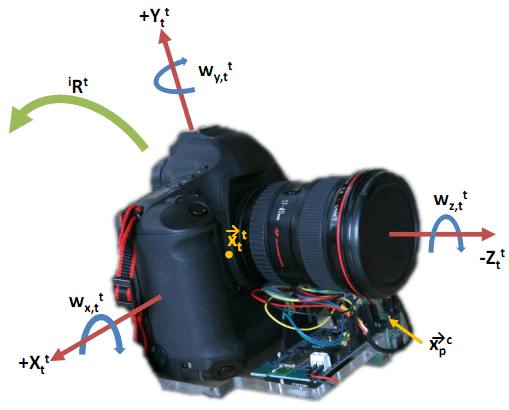
Click to view larger version Now a team at Microsoft Research has had an amazing about of fun building a camera with 3 gyros and a 3D accelerometer. The idea is that if you know the camera's orientation and movement you can deduce the exact form of the distortion and apply the appropriate filter to undo the effect. The extra camera hardware - it's based on an Arduino - computes the cameras position in realtime during the exposure (triggered via the flash connection).
The key result is that this whole camera sensor method worked better than lens based image stabilisation or software only deconvolution. It also only removes blur due to camera movement - linear and angular. It's ideal for taking photos from the deck of a ship or any moving vehicle. It also uses cheap off-the-shelf components so it's entirely possible that it could end up in mobile phone cameras and other low end digital cameras. Of course you could just buy a tripod. More information
|
| Last Updated ( Sunday, 05 December 2010 ) |