| Robot Swarms Get Their Own Drones |
| Written by Harry Fairhead |
| Sunday, 28 October 2012 |
|
How can a swarm of robots get a global picture of its environment? Easy it simply sends up a drone. We are used to thinking of drones as being used for surveillance by humans operating on the ground, but what is good for humans is good for robots too. Swarms of robots don't all have to be of the same type and one of the best known attempts to build a heterogeneous swarm was the swarmanoid project. Originally the swarmanoid consisted of three types of robot - eyebots, footbots and handbots. Now we have to add a flying drone to provide an aerial overview to the swarm. The drone can view the overall terrain and run simulations of what configurations of robots could best traverse the slopes. Once it has worked out how to assemble the robots into a single machine the drone has to communicate the plan to the swarm.
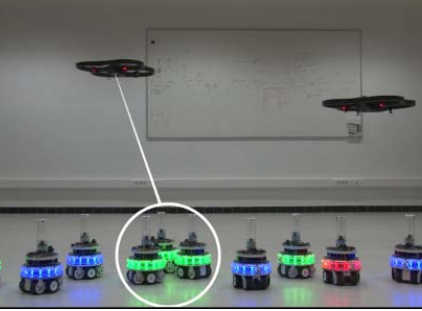
The communication and coordination problem has been solved in a novel way, as explained in a recent paper presented at this month's International Conference on Intelligent Robots and Systems The pretty colored lights on each bot are more than just decorative. To avoid the complex design of a point-to-point communication system, the drone simply broadcasts to all the robots. However, what the drone wants to tell the swarm is that a particular robot or set of robots should do something. To pick out which robot the drone is talking to, the colors are used in a synchronization algorithm. The basic idea is that the robots on the ground go through a random sequence of color changes - the flying drone simply follows the color changes of the robot it wants to talk to. This avoids the need for any sort of GPS or robot identities. The drone simply picks the robot at the appropriate location.
In the video, from researchers at the Universite Libre de Bruxelles and Instituto Universitario de Lisboa, you can see all this in action. along with some other group behavior including bringing some snacks to a TV-watching human - perhaps we don't deserve robotic swarms after all!
More InformationSpatially Targeted Communication and Self-Assembly. Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2012). Vilamoura, Algarve, Portugal. October 2012.
N. Mathews, A. L. Christensen, R. O'Grady, and Marco Dorigo
Comments
or email your comment to: comments@i-programmer.info
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter. 
|
| Last Updated ( Sunday, 28 October 2012 ) |