| Build Your Own Soft Robot |
| Written by Harry Fairhead | |||
| Saturday, 27 September 2014 | |||
|
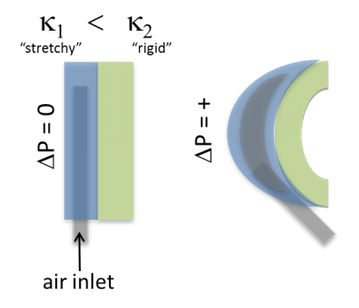
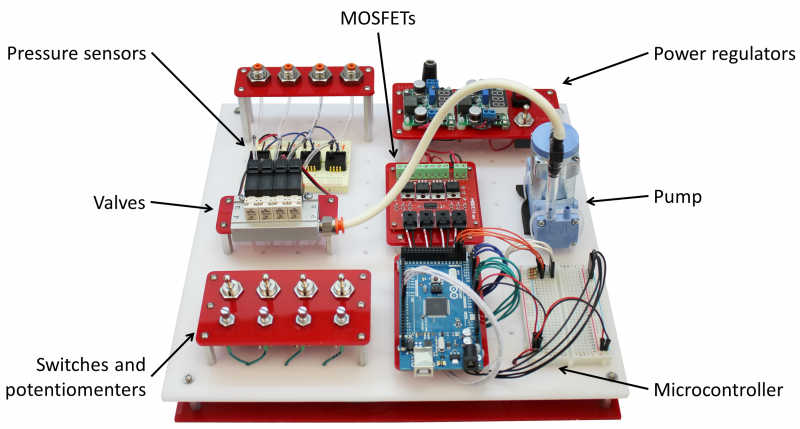
Soft robots are an unexpected development in robotics technology and, while they have obvious attractions, getting started building one is more difficult than buying off-the-shelf components, Now Harvard has put together a "get you started pack". The most obvious way to build a robot, at least from the point of view of an an electronics engineer, is to put together an articulated framework with some motors or other electrical actuators. This is a very easy way to get started because the actuators are off-the-shelf components and building a frame is just a matter of metal joining. Soft robots, on the other hand, make use of pneumatic power and custom-built soft actuators. The basic idea is that when you pump some air into a plastic component the pressure makes it change shape. The clever part is that by carefully designing the component using internal chambers and external creases you can encourage the component to bend in particular ways. Designing and making such components is a big barrier to getting started with soft robots, as is the necessary air or hydrualic systems necesary to pump them up - not to mention the electomagnetic valves needed to control the actuators.
This is the problem Harvard Biodesign lab is aiming to solve with its new soft robotics toolkit. This is a set of shared resources that help with the task of creating actuators using 3D printed moldes and fluidic switches.
Take a look at the video to get the idea of what is on offer:
Apart from being, fun soft robots have lots of applications that make them more suitable than hard robots. Any time a robot human interaction is involved, a soft robot is obviously going to be a safer device - although given enough pressure and big enough actuators "soft" might be a misleading term. Soft robots are closer to biological systems because of the way that their actuators mimic muscles and their ability to use a central power source is also an advantage. I wonder what a soft robot vacuum cleaner would look like - after all its need for "suck" goes very nicely with the actuator's need for "blow".
More InformationRelated ArticlesInflatable Robots - Safe and a Lot of Fun!
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info
http://softroboticstoolkit.com/ |
|||
| Last Updated ( Sunday, 15 October 2023 ) |