| A Robot That Runs Like A Cat |
| Written by Harry Fairhead | |||
| Sunday, 23 June 2013 | |||
|
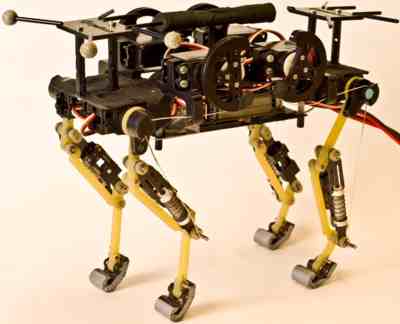
This is a cat video with a difference - the cat isn't the star of the show. Take a lightweight robot body and make it run like a cat. Sounds easy, but making it look as good as it does takes work - see the video. We have seem to have a burst of activity in how two-legged and four-legged robots move. Following on from the impressive, but smal,l humanoid robots that walked like humans we have quadruped robots that move like donkeys or in this case like a cat. EPFLs (Ecole Polytechnique Federal de Lausanne) Cheetah-Cub robot is fast at 1.42m/s and light at 1Kg. It is only 21cm long,has 15cm legs and can fit anywhere a small cat could. See the video - you can't help but be impressed:
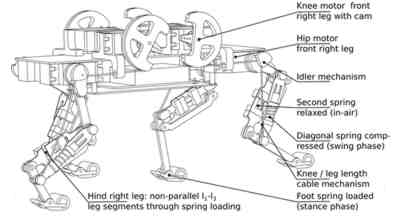
The design is interesting and seems to be biologically inspired:
Biorobotics Laboratory, EPFL. It is has self-stabilizing properties, even without feedback to control it. The gait is controlled by a central pattern generator CPG, which mimics the way the brain produces locomotion signals to the muscles. It has already been used by the group to implement the Amphibot and Salamadra robots. The CPG for the Cheetah-Cub can produce a variety of trot-gait patterns. Before you start thinking about robot pet cats, the objective of the work is to create a general purpose robotics platform that could be used in exploration or rescue. Although I do think that there would be a market for a kit of parts.
More Information"Towards Dynamic Trot Gait Locomotion-Design, Control and Experiments with Cheetah-cub, a Compliant Quadruped Robot". Sprowitz, Alexander; Tuleu, Alexandre; Vespignani, Massimo; Ajallooeian, Mostafa; Badri, Emilie; Ijspeert, Auke. The International Journal of Robotics Research 0278364913482017, first published June 17, 2013 as doi:10.1177/0278364913482017. Draft Version.
Related Articles
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Monday, 24 June 2013 ) |