|
The autonomous line-following robot built by Vstone was the first to cross the finish line after racing for over 26 miles but with only one second's lead.
Five robots took part in the race organised by the Japanese robotics company Vstone around a deliberately tortuous course but one robot retired prematurely and only two completed the 422 laps for a full marathon of over 26 miles.
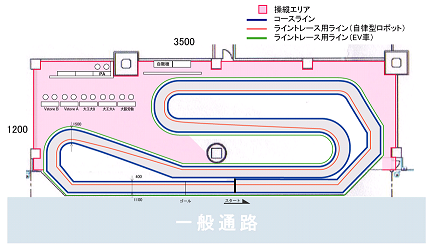
The winning time for Robovie PC, Vstone's entry into the race, that that took place in Osaka, was 54 hours 57 minutes 50 seconds with the radio-controlled robot entered by the Center for Robotics crossed the line only one second later and had the fastest walking speed. The A-Team from the Osaka Institute of Technology completed 200 laps giving it 3rd place while the B-Team "retired in chagrin" according to the Google translation of the Japanese site. The 4th place went to the Osaka Labor Association employment team, a job creation team that used a bipedal-robot kit that completed 100 laps.

Although these results may not seem impressive compared to times in the major human marathons they do represent advances in bipedal robot locomotion and show they are capable of twists and turns.
More Information:
A Robot Marathon
Vstone
Ada Lovelace: Countess Of Computing
14/10/2025
Today, October 14th, is Ada Lovelace Day with events around the globe taking place to raise the profile of women in science, technology, engineering and math. Although the date, the second Tuesda [ ... ]
|
W3C Adopts A New Logo
31/10/2025
The World Wide Web Consortium (W3C) is rolling out a new logo following the release of strategic objectives to support W3C's roadmap and the formation in 2023 of W3C as a non-profit, public-interest o [ ... ]
| | More News |
|
