| Unified Particles Make Better Graphics |
| Written by Alex Armstrong | |||
| Sunday, 18 May 2014 | |||
|
This is one that somehow got away from the SIGGRAPH video earlier in the week - but it's very well worth seeing. A new unified particle system creates some amazing graphics effects. As graphical systems become more powerful and sophisticated we can actually revert to simpler approaches to modeling real world objects. Miles Macklin, Matthias Muller, Nuttapong Chentanez and Tae-Yong Kim from NVIDIA are presenting a paper at this year's SIGGRAPH that takes a big step forward in particle simulation.
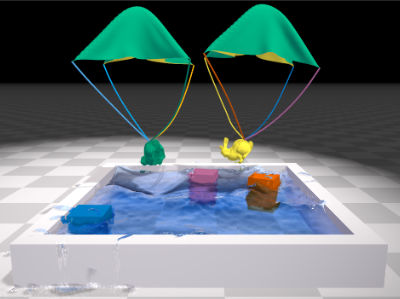
Using a new parallel constraint solver they manage to use a constrained particle system to model not just the sort of thing that you usually think of as a particle system - i.e. gases, liquids and smoke - but also deformable solids, rigid bodies and cloth. The point is, if your graphics is powerful enough everything is a particle.
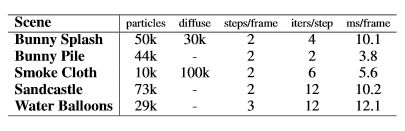
As Miles Macklin says on his blog: "As noted in the paper, unified solvers are common in offline VFX, but are relatively rare in games. In fact, it was my experience at Rocksteady working on Batman: Arkham Asylum that helped inspire this work. The Batman universe has all these great characters with unique special powers, and I think a tool like this would have found many applications (e.g.: a Clayface boss fight). Particle based methods have their limitations, and traditional rigid-body physics engines will still be important, but I think frameworks like this can be a great addition to the toolbox." Some of the effects, like the particle behaviour of non-convex objects, are a bit subtle and you need to look carefully at the effect of friction. The most important thing to note is that all of the rendering is done in real time. You can see the performance from a table included in the paper: There is room for more work. To quote from the conclusion: "In the future, we would like to remove the requirement of fixed particle sizes through the use of hierarchical acceleration structures. This would allow rigid bodies and fluids to be simulated more efficiently. Solving certain constraint types at different frequencies would also improve efficiency.
Particles alone cannot accurately represent large flat surfaces, and
our first order SDF is not accurate enough to provide useful collision normals near the surface of poorly sampled shapes. Using a quadratic basis function and reconstructing the signed distance value (instead of point sampling) could improve results for sparse samplings"
You can find more out about the computation in the paper. More InformationUnified Particle Physics for Real-Time Applications (pdf) Related ArticlesSIGGRAPH University - Learn OpenGL Water In WebGL - One You Have To See 3-Sweep - 3D Models From Photos WebGL - Trojans, Snakes And Real Time Textures
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

Comments
or email your comment to: comments@i-programmer.info
|
|||
| Last Updated ( Sunday, 18 May 2014 ) |