| Kilobots Work Together |
| Written by Harry Fairhead | |||
| Sunday, 13 January 2013 | |||
|
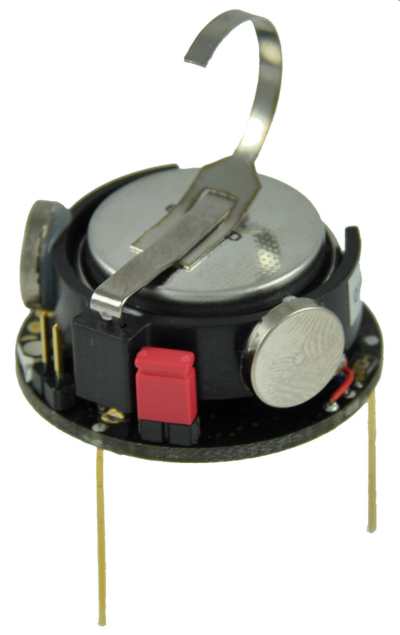
The Kilobot swarm building robot is an ideal candidate for experiments in how swarms can do useful things. We have three new videos showing how cooperation pays off even if there is no master controller.
The latest videos from the research group show the Kilobots in action carrying out basic swarm algorithms. As you watch the videos below you need to keep in mind that each Kilobot is running the same program. The behavior that emerges does so from very simple swarm intelligence. In the first video we see a large Kilobot swarm synchronize its flashing using the firefly algorithm. This makes the robots adjust their internal clocks when they see a neighbor flash. As you watch the video you can see a strange organizational wave move across the group until finally they flash in time:
Slightly less impressive, but still interesting to watch, is a video of a swarm of Kilobots moving toward the light, i.e. phototaxis:
The final video is of swarms of Kilobots moving together so as to transport a large object. You have probably seen ants co-operating in the same way to move much larger objects. Again you need to remember that the Kilobots are all running the same program. In this case the movements of the individual Kilobot is restrained by the large shape being moved, but their combined average movement is the movement of the large shape.
The art of swarm intelligence is in finding simple rules that each member of the swarm can follow to produce collective behavior that seems to be more than just the simple rule. To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Sunday, 13 January 2013 ) |