| DARPA's Robot Challenge Gets Underway |
| Written by Harry Fairhead | |||
| Saturday, 21 December 2013 | |||
|
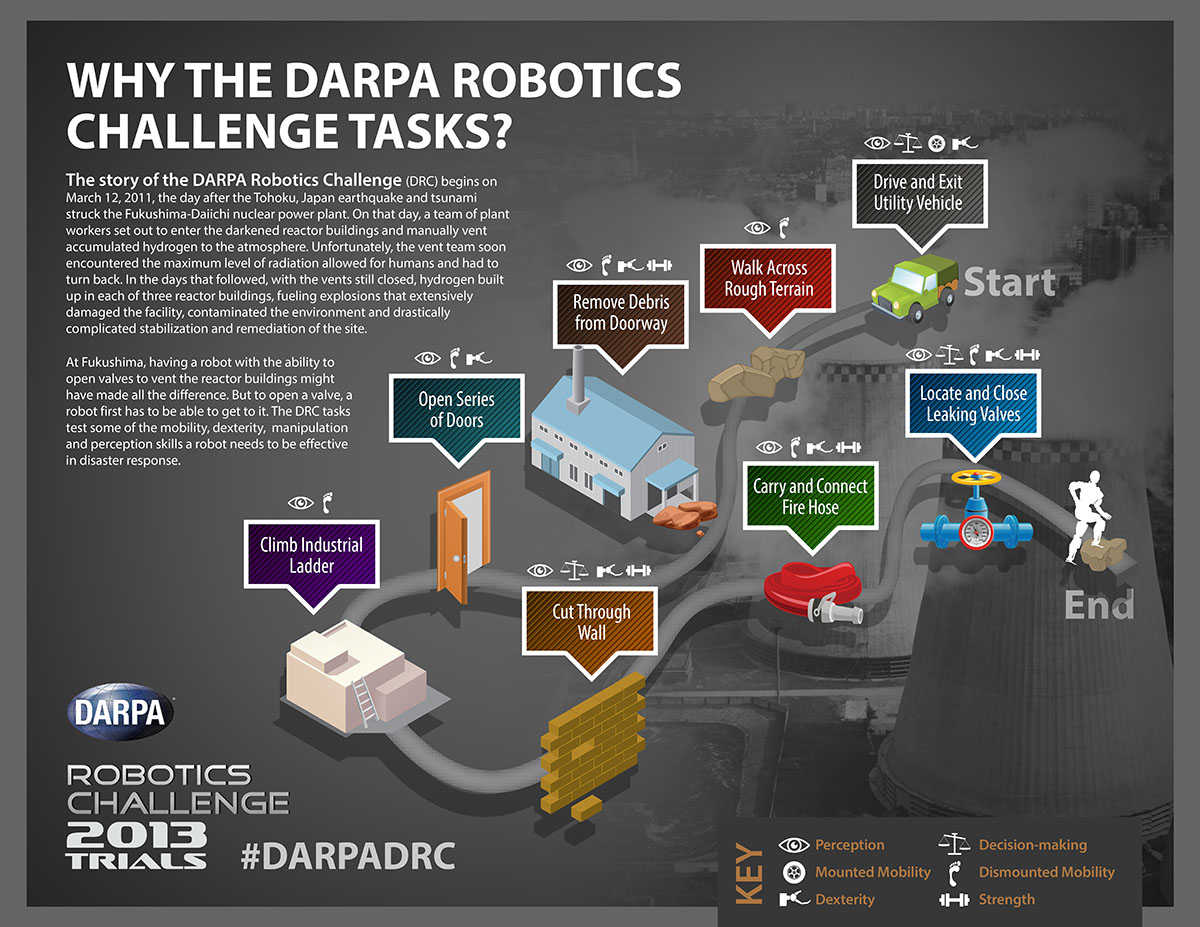
At last DARPA's robot challenge has started. There are videos and a live feed showing how the robots are to doing and so far the verdict is... slow and mostly unimpressive. For information on the winners see: Google's Schaft Wins DARPA Robotics Challenge DARPA's robot challenge is a grand competition to find a robot that can rescue people and generally make the world a safer place. Seventeen teams participated in the trials at Florida’s Homestead Miami Speedway, December 20-21. The Trials are to provide a baseline on the current state of robotics and determine which teams will continue on to the DRC Finals in 2014 with continued DARPA funding. Competing in the 2014 Finals will lead to one team winning a $2 million prize.
But currently the "baseline" seems to be setting itself a little on the low side. If you live in a world where humanoid robots move around at anything approaching frightening speeds then it appears that you are a bit into the future. The robots in the DARPA challenge look impressive when they are standing still, but as soon as they are given something to do then it is like watching paint dry. This is not a spectator sport. What is the reason for the sluggish performance? It isn't 100% clear, but it seems that the software takes time to plan each move. When the robot actually gets a command to move it moves at a reasonable speed, then it pauses waiting for the next update. Compared to a human, who would by comparison throw themselves into the task and put up with and correct positioning errors dynamically, it seems that the DARPA robots all try to precompute the perfect moves before making any. It might be that this is just the warm up phase and the robots have a "second gear", but somehow I doubt it. If you would like to see what I am getting at try the following video which is the recorded live feed of the entire trials: (Things start to happen at about 50 minutes, the video is nearly 11 hours long, in and to get a feeling for the "action" sample the video at various times.)
Is this disappointing? Yes a little, but you need to remember how poor the initial performance on the DARPA self-driving car challenge was and in just a few years things went from not-working to almost production ready. Overall the seriousness of the exercise and the commitment from the teams looks good for the future so overall its positive. There is also the possibility that there is a robot winner somewhere in the pack just waiting to emerge, but at the moment if you are in trouble I woudn't wait to be rescued by a robot. We clearly need some new algorithms or better implementation. For information on the winners see: Google's Schaft Wins DARPA Robotics Challenge
More Informationhttp://www.theroboticschallenge.org/
Related ArticlesGoogle Adds Boston Dynamics To Its Robotics Acquisitions DARPA'S ATLAS Robot Needs A Brain
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Sunday, 22 December 2013 ) |