| Arthrobots - Soft and Flexible |
| Written by David Conrad | |||
| Saturday, 08 July 2017 | |||
|
No not arthropods, which are icky insects and scary spiders - but arthrobots which are sort of robot arthropod. They move like insects and they are a new class of soft robots. Inspired by arthropod insects and spiders, researchers have created an entirely new type of semi-soft robots capable of standing and walking using drinking straws and inflatable tubing. The team was even able to create a robotic water strider capable of pushing itself along the water’s surface.
The arthrobots from Harvard Professor George Whitesides and Alex Nemiroski, a former postdoctoral fellow and are described in a recently published paper in the journal Soft Robotics. To quote from its abstract: "Arthrobots" — inspired, in part, by the musculoskeletal system of arthropods (spiders and insects, inter alia) - combine mechanical compliance, lightweight and simple construction, and inexpensive yet scalable design. An exoskeleton, constructed from thin organic polymeric tubes, provides lightweight structural support. Pneumatic joints modeled after the hydrostatic joints of spiders provide actuation and inherent mechanical compliance to external forces. An inflatable elastomeric tube (a ‘‘balloon’’) enables active extension of a limb; an opposing elastic tendon enables passive retraction. Robots constructed from these structural elements demonstrate: (i) crawling with one or two limbs (ii) walking with four or six limbs (including an insect-like triangular gait) (iii) walking with eight limbs, (iv) floating and rowing on the surface of water
Arthrobots have the twin advantages of being simple to fabricate and being safe to operate around humans.
Unlike earlier generations of soft robots, which could stand and awkwardly walk by inflating air chambers in their bodies, the new robots are designed to be far nimbler. Though real-world applications are still far off, the researchers hope the robots eventually could be used in search operations following natural disasters or in conflict zones. “If you look around the world, there are a lot of things, like spiders and insects, that are very agile. They can move rapidly, climb on various items, and are able to do things that large, hard robots can’t do because of their weight and form factor. They are among the most versatile organisms on the planet. The question was, how can we build something like that?” The answer, Nemiroski said, came in the form of a drinking straw: “This all started with an observation that George made, that polypropylene tubes have an excellent strength-to-weight ratio. That opened the door to creating something that has more structural support than purely soft robots have ... then we took inspiration from arthropods to figure out how to make a joint and how to use the tubes as an exoskeleton. From there it was a question of how far can your imagination go?
More InformationFrom drinking straws to robots Arthrobots - article for Soft Robotics (pdf) Related ArticlesThe Virtual Evolution Of Walking
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info
|
|||
| Last Updated ( Saturday, 08 July 2017 ) |
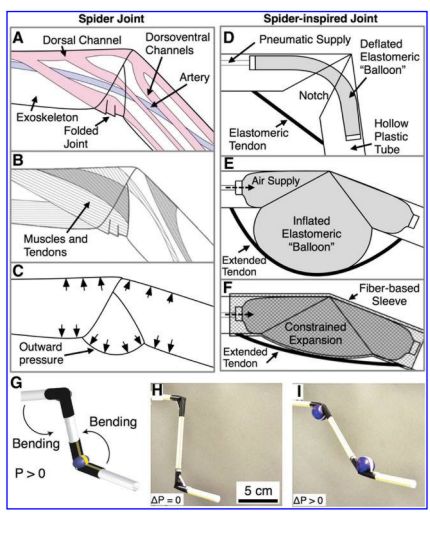 FIG. 1. Cross-sectional sketches comparing the anatomy of a spider joint to that of a spider-inspired joint and fabricated joints. (A) Vasculature of a typical spider joint (part of an open circulatory system); joints fold by a bellows-like configuration. (B) Musculature of the typical spider joint. (C) Sketch detailing how hemolymph (the circulatory fluid of an arthropod) flows out of the artery to fill and eventually expand the joint hydraulically to extend the limb. Schematics in (A–C) are modified from Ref.15 (D) Sketch of spider-inspired joint formed from a plastic tube with a notch, an elastomeric ‘‘balloon,’’ and a passive elastomeric tendon. (E) Sketch detailing the extension of the spider-inspired joint through pneumatic expansion of the elastomeric balloon. (F) Sketch detailing the extension of a spider-inspired joint where pneumatic expansion of the elastomeric balloon is constrained by a fiber-based sleeve that is flexible but inextensible. (G) Schematic of a limb with two identical actuators. Images of a limb with both actuators are unpressurized (H) and pressurized to DP = 70 kPa (I).
FIG. 1. Cross-sectional sketches comparing the anatomy of a spider joint to that of a spider-inspired joint and fabricated joints. (A) Vasculature of a typical spider joint (part of an open circulatory system); joints fold by a bellows-like configuration. (B) Musculature of the typical spider joint. (C) Sketch detailing how hemolymph (the circulatory fluid of an arthropod) flows out of the artery to fill and eventually expand the joint hydraulically to extend the limb. Schematics in (A–C) are modified from Ref.15 (D) Sketch of spider-inspired joint formed from a plastic tube with a notch, an elastomeric ‘‘balloon,’’ and a passive elastomeric tendon. (E) Sketch detailing the extension of the spider-inspired joint through pneumatic expansion of the elastomeric balloon. (F) Sketch detailing the extension of a spider-inspired joint where pneumatic expansion of the elastomeric balloon is constrained by a fiber-based sleeve that is flexible but inextensible. (G) Schematic of a limb with two identical actuators. Images of a limb with both actuators are unpressurized (H) and pressurized to DP = 70 kPa (I).
