| An Inverted Pendulum for Xmas |
| Written by Lucy Black | |||
| Sunday, 27 December 2020 | |||
|
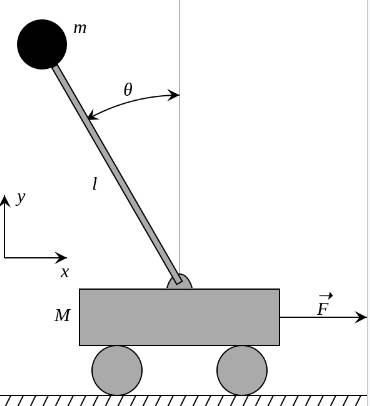
This year's holiday robot videos have been a bit predictable, but at last I found one that was interesting - an inverted pendulum balanced by a drone. The inverted pendulum is a favourite of AI and robotic systems. Another way to describe it is to say that the task is to balance a pole on the palm of your hand. This is a classic reinforcement learning task. Usually the pole is balanced on the base of a railway truck which is moved backwards and forward in an effort to keep it upright.
I have seen inverted pendulum tasks solved using a quad-rotor in place of a truck, but this one is incidental and used without ceremony or explanation - it forms the trunk of the "xmas tree" display created by Dynamic Systems Lab at the University of Toronto Institute for Aerospace Studies: How fast something that once was a state of the art achievement has become a xmas decoration...
The video is short and sweet and there's a coda in the credits where a stationery quad-rotor joins in a rendition of Jingle Bells. More Informationhttps://www.dynsyslab.org/vision-news/ Related ArticlesWatch An Inverted Pendulum - Arduino-Driven Worm Balances A Pole On Its Tail To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info |
|||
| Last Updated ( Sunday, 27 December 2020 ) |