| Robot Fear Of Falling - South Koreans Win DARPA Robotics Challenge |
| Written by Harry Fairhead | |||
| Sunday, 07 June 2015 | |||
|
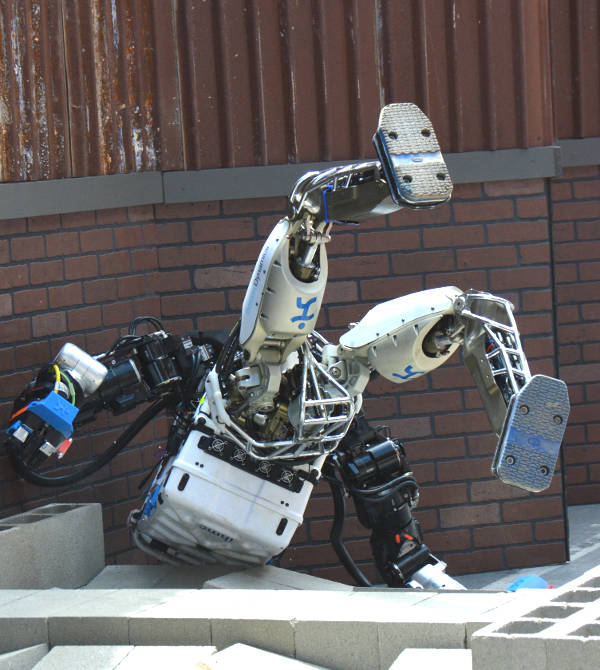
It's all over! After waiting so long, we at last know how the big impressive robots did at the rescue tasks that DARPA thought up for them. And the sad news is that you aren't going to be rescued by a robot just yet. And a lot of robots fell over. After the preliminary contest most people would have bet on the DARPA challenge being a big boring joke. As it turned out the teams had all improved so much that the efforts looked credible, even if not ready for the real world. Oddly one of the things that seems to have held back the performances is a fear that a robot might be damaged by falling. This seems to have been a particular worry for the teams using the Boston Dynamics Atlas robot. Even Boston Dynamics wasn't sure how robust its creation was and suggested that it was better for the robot to fall on its back rather than front! All of the teams had made use of tethers to make sure that their robots would not fall over and break something during the testing phases but for the real thing tethers weren't allowed and so robots fell over. Take a look at this compilation video from IEEE Spectrum. It is very funny if you like seeing robots fall over: It makes you think that we aren't going to be welcoming our robot overlords for some time yet! More interestingly it also makes you wonder why so many of the teams went for a bipedal design? It is clearly a big enough problem to stay upright with such a design, let alone achieve anything useful. The robot that did win $2 million for the South Korean team KAIST was humanoid, but with sepcial modifications like wheels on its knees that helped it avoid falling. The design made it possible for the robot to use its bipedal form when this was an advantage but to drop to its knees and drive on wheels when this was possible. The DRC-HUBO completed the task with a perfect score of 8 and took just over 44 minutes.
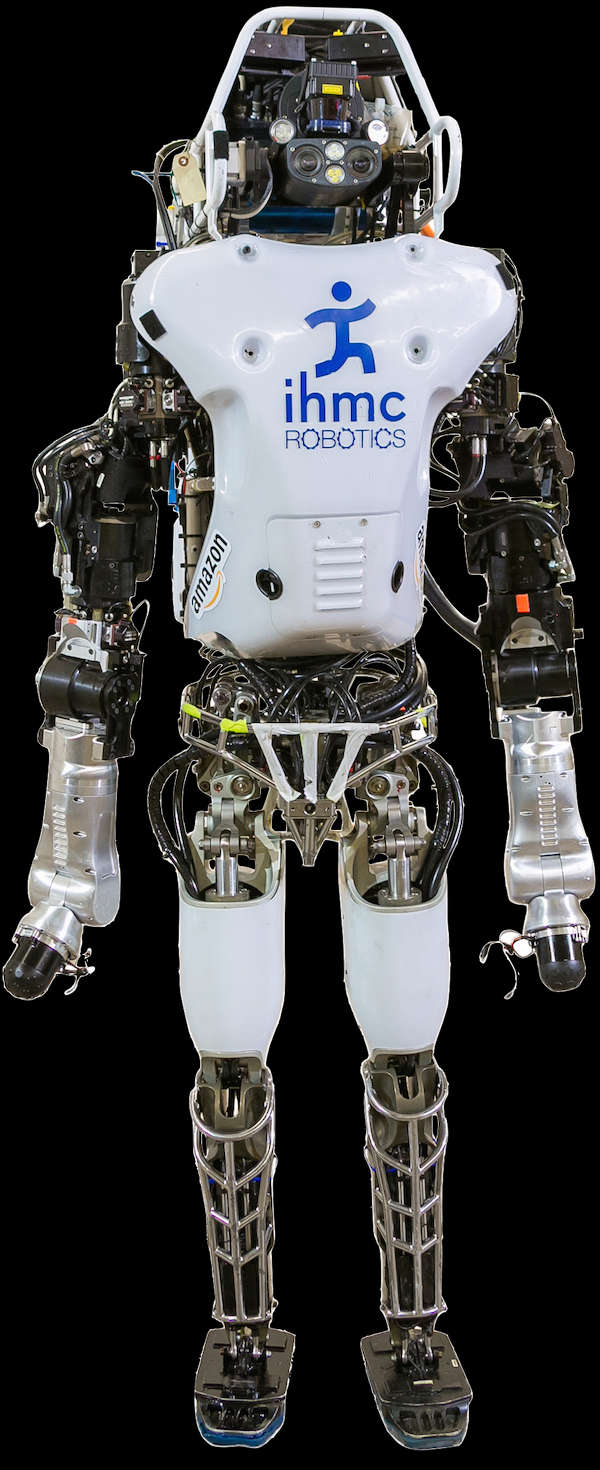
One of the hardest tasks was one you might have thought would be the easiest. It seems going though a door is a tough challenge for a robot. They can open the door, this part really is easy but once open they have to figure out how to get through. The Atlas robots mostly had to turn sideways on and shuffle. Interestingly. in second place with a prize of $1 million was an Atlas robot. Team IHMC Robotics used a standard Atlas called Running Man which also scored 8 but in a slightly slower time of just over 50 minutes. So it seems with the right software Atlas can stand up long enough to achieve good results - although Running Man did take a tumble on the way to second place.
In third place was one of the more non-humanoid robots. The Tartan Rescue team won $500,000 with its almost quadraped robot, which also scored a perfect 8 in just over 55 minutes.
Performances improved on last year's trial in that the three winners scored a perfect score, which means they accomplished all eight tasks and in reasonable times. What is not apparent from these numbers is that none of the robots looked as if they were anywhere near ready to run into a burning building and rescue anyone. For one thing all but one of of the robots that fell over had to be picked up by their human teams. It all goes to remind us how amazing we humans are and how hard the problem of creating a device as flexible and capable as us. The next time you walk across a floor, open a door and go through it just think how easy for you and how hard for a robot!
More InformationRelated ArticlesSelling The DARPA Robotics Challenge Darpa Robotics Challenge Grows Atlas Rebuilt - DARPA's Almost New Robot Google's Schaft Wins DARPA Robotics Challenge DARPA's Robot Challenge Gets Underway Google Adds Boston Dynamics To Its Robotics Acquisitions DARPA'S ATLAS Robot Needs A Brain
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.

Comments
or email your comment to: comments@i-programmer.info
|
|||
| Last Updated ( Sunday, 07 June 2015 ) |