| Microsoft Open Sources Drone Simulator |
| Written by Kay Ewbank | |||
| Friday, 17 February 2017 | |||
|
An open source simulator that you can use to crash-test drones and robots has been released by Microsoft. The simulator can be used to test the devices virtually rather than wrecking them in the real world. The kit can also be used on autonomous self-driving vehicles. The software is part of a research project from Microsoft called the Aerial Informatics and Robotics Platform, and it includes software that lets you write code to control drones and robots in a realistic simulator. Microsoft researchers point out that one problem with drones and robots is that they don't differentiate between actual objects (or people) and less problematic things to 'bump into' such as shadows, reflections, and clouds.
The idea behind the simulator software is that you can train and test devices without running into real obstacles. Microsoft researcher Ashish Kapoor said: “The aspirational goal is really to build systems that can operate in the real world. That’s the next leap in AI, really thinking about real-world systems.” Until recently, while simulators could be used for rudimentary testing, they weren’t accurate enough to reflect the complexities of the real world. The Microsoft researchers say tht recent advances in graphics hardware, computing power and algorithms have enabled the creation of simulators that offer a much more realistic view of the environment. Aerial Informatics and Robotics Platform’s simulator is built on the latest photorealistic technologies, which can accurately render subtle things, like shadows and reflections, that make a significant difference in computer vision algorithms. The simulator can therefore be used to crash test costly drones, robots or other gadgets as often as necessary without the costs associated with damaging the device or its surroundings. It also lets the researchers improve their AI research, including gathering training data, which is used to build algorithms that can teach systems to react safely, and conducting the kind of AI research that requires lots of trial and error, such as reinforcement learning.
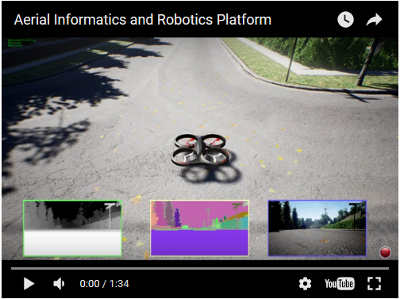
The video below shows the simulator in action with a simulation of the quadrotor flight in a sub-urban environment. The visuals depict how the camera mounted on the quadrotor perceives the world.:
In addition to the simulator, the Aerial Informatics and Robotics Platform includes a library of software that you can use to write code to control drones built on either DJI or MavLink. More tools are expected to be added to the platform. The entire platform is designed to work on any type of autonomous system that needs to navigate its environment, according to Kapoor: “I can actually use the same code base to fly a glider or drive a car.” The researchers are also hoping the Aerial Informatics and Robotics Platform will jumpstart efforts to standardize protocols and regulations for how artificial intelligence agents should operate in the real world.
More InformationAerial Informatics Robotics Platform Related ArticlesSoftware Makes Cheap Dumb Robots Interesting - Bots_Alive Delivery Robots Becoming A Reality Robots Taught To Avoid Faceplants
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Twitter, Facebook or Linkedin.

Comments
or email your comment to: comments@i-programmer.info |