| There's A New Swarming Robot On The Block - BOBbot |
| Written by Harry Fairhead |
| Sunday, 09 May 2021 |
|
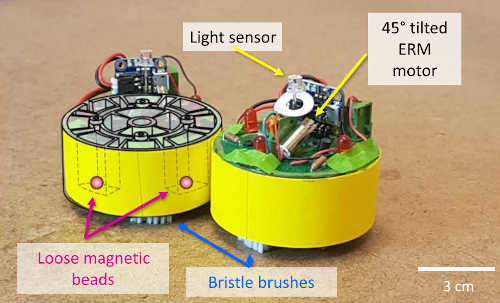
Robots small enough to operate in swarms are nothing new, but BOBbot is bigger than most and has a secret in its body -magnets. BOBbot stands for "behaving orgainizing buzzing bots", but why let an acronym ruin a good name. Previous robot swarms have been based on much simpler robots. BOBbot is bigger and more sophisticated. Each is 3D printed and has a vibrating brush which moves it. It is light-sensitive and has two magenets inside its case.
The thrust of the research so far seems to be about testing out the equations of self-organizing particle systems, but they also show how simple algorithms can be used to co-operatively move objects larger than themselves: I've been watching developments in swarm robotics for some time and to be honest I've been a little disillusioned by the progress. Something like the nanobots of Sci Fi still seem to be a long way off. The small bots used always seem to lack mobility and intelligence. Yes the idea may be to work collectively, but collective algorithms are limited by the intelligence of the individual. At the moment the research seems to be at the level of statistical physics, rather than useful robotics: In this paper, we use mathematical ideas from distributed computing and statistical physics to create task-oriented cohesive granular media composed of simple interacting robots called BOBbots. As predicted by the theory, the BOBbots aggregate compactly with stronger magnets (corresponding to large bias parameter λ) and disperse with weaker magnets (or small λ). Simulations capturing the physics governing the BOBbots’ motions and interactions further confirm the predicted phase change with larger numbers of BOBbots. The collective transport task then demonstrates the utility of the aggregation algorithm. Given the low cost and power of devices such as the Raspberry Pi Pico, perhaps what we need is an open source project to create a robot replicator which can 3D-print finished robots that cost less than $10 per device.
More InformationProgramming active cohesive granular matter with mechanically induced phase changes Shengkai Li, Bahnisikha Dutta, Sarah Cannon, Joshua J. Daymude, Ram Avinery, Enes Aydin, Andréa W. Richa, Daniel I. Goldman, Dana Randall Simple Robots, Smart Algorithms: Meet the BOBbots Related ArticlesYour Next Robot Maybe A Collection Of Balls Robot Swarms Get Their Own Drones Quadrotor Swarm Constructors (video) To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Twitter, Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info
|
| Last Updated ( Sunday, 09 May 2021 ) |