| Your Next Robot Maybe A Collection Of Balls |
| Written by Mike James | |||
| Sunday, 08 November 2020 | |||
|
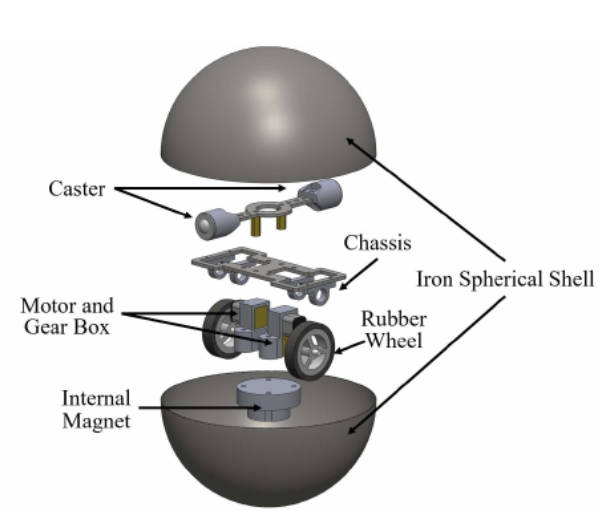
This is fun. Take a steel ball and place a small two-wheel drive mechanism which sticks to the inside of the ball with the help of a magnet. Now make a few of them and you have a reconfigurable swarm. The basic idea is very simple, and very similar to the well-known Sphero robots, but in this case the idea is to use them in a cooperative swarm.
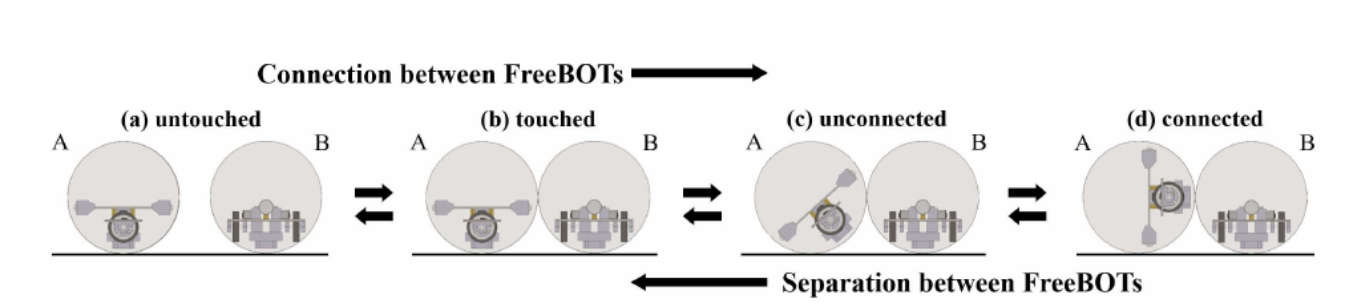
As well as providing traction, The magnets, also provide a way that the robots - FreeBots - can join together.
Now you have the general idea, take a look at some FreeBots in action: The part of the exercise that really fascinates me is the way that you can invent swarm algorithms that make the FreeBots capable of doing more as a team than as individuals.
There are some problems, however. At the moment, the FreeBots are not autonomous and the metal shell presents a barrier between the electronics and the outside world. To charge the FreeBot you have to take it to pieces and, at the moment, there are no sensors. It isn't even clear what sensors are needed. How far could you get with an accelerometer based SLAM? At the very least, you need some sort of proximity measurement between the FreeBots and why not change the permanent magnet for an electromagnet? The research team have their own plans: "In this paper, FreeBOT is remotely controlled to demonstrate these experiments. Our group is researching on the relative localization and motion planning algorithm for FreeBOT system. In the future, we will equip FreeBOT with these technologies to realize an autonomous FreeBOT system. In addition, we will increase the number of FreeBOT to fully demonstrate the enormous potential of FreeBOT in realizing more MSRR applications."
More InformationGuanqi Liang, Ming Li and Huihuan Qian Related ArticlesReefScouts - Swarm Water Robotics Modern Fireworks - 100 Drones Break The Record To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Twitter, Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info
|
|||
| Last Updated ( Monday, 09 November 2020 ) |