| Robots Taught To Avoid Faceplants |
| Written by Harry Fairhead |
| Sunday, 18 October 2015 |
|
Although we may find the spectacle of Robots falling down amusing, given the amount of damage such falls cause in expensive machines they are really far from funny. The sorts of falls that are the most damaging, to humans as well as to robots are called faceplants because you’re planting your face into the ground as a means of breaking your fall, which usually also breaks your face.
Fear of falling, on the part of robotics engineers, seems to be holding up progress with the performance of humanoid robots. So while we might laugh at the compilation video of spectacular falls from this year's Darpa Robotics challenge, see Robot Fear Of Falling we should be more sympathetic.Being able to recover from a fall without crashing to the ground, or falling so as to minimize head trauma is an important new skill for robots like Atlas. Researchers at Georgia Tech are working on techniques that can be used by humanoid robots to allow them fall more safely, which might protect them enough to actually be able to get up again. Ph.D. graduate Sehoon Ha and Professor Karen Liu have developed an algorithm that tells a robot how to react to a wide variety of falls – from a single step to recover from a gentle nudge, to a rolling motion that breaks a high-speed fall. As a result, robots can minimize the damage or injury they might cause to themselves or others while falling by learning the best sequence of movements to slow their momentum. Ha explained the rationale and focus of the experimental study: "“A fall can potentially cause detrimental damage to the robot and enormous cost to repair. We believe robots can learn how to fall safely. Our work unified existing research about how to teach robots to fall by giving them a tool to automatically determine the total number of contacts (how many hands shoved it, for example), the order of contacts, and the position and timing of those contacts. All of that impacts the potential of a fall and changes the robot’s response.”
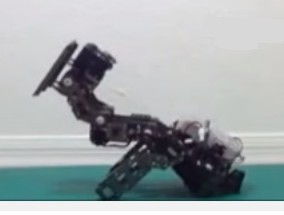
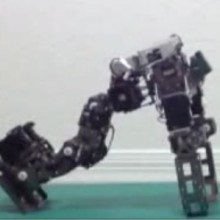
Their tests are shown in this video. In the first two the top robot uses the planning algorithm whereas the bottom robot doesn't. In the third test, which would cause the most damage, the algorithm is used:
The study built on previous research in which Professor Liu studied both cats and athletes and showed that one of the most important factors in a fall is the angle of the landing. It relied on the idea that a well-designed robot has the “brain” to compute a softer landing, but hadn’t yet optimized the sequence of motions that take place during a fall and so the new algorithm was designed to takes into account the hardware constraints and the capabilities of the robot, and suggests a sequence of contacts so the robot gradually can slow itself down. The algorithm may mean we witness fewer robot faceplants in future,and fewer costly repairs, but it should lead to robots gaining more confidence.
More InformationHow to Fall Gracefully If You’re a Robot Related Articles
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on, Twitter, Facebook, Google+ or Linkedin.

Comments
or email your comment to: comments@i-programmer.info |
| Last Updated ( Sunday, 18 October 2015 ) |