| SnoBots In Training For RoboCup 2014 |
| Written by Sue Gee | |||
| Sunday, 23 February 2014 | |||
|
SnoBots, a team of four kid-size robots trained at the University of Manitoba Autonomous Agents Lab, is getting ready for its second appearance at RoboCup. This video shows them not only to be cute, but also to have surprising agility. Playing soccer requires a combination of basic skills - the ones our human antecedents had to acquire in order to become bipedal. To be an effective player not only does a robot need basic walking it also has to coordinate vision with limb placement, be able to respond, regain its balance after falling. And there is an art to falling as demonstrated in the goal keeping section of this qualification video for RoboCup 2014.
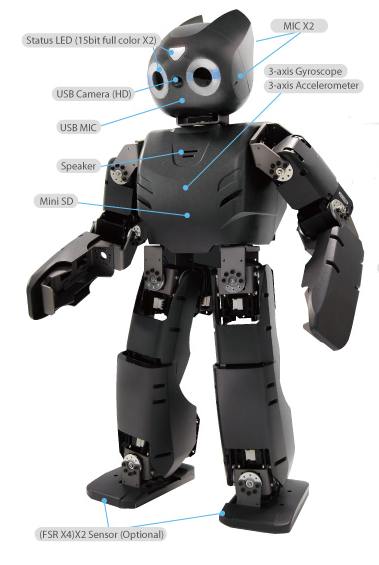
The SnoBots - Jimmy, Jennifer, Jeff and Jose - are DARwIn-OP (standing for Dynamic Anthropomorphic Robot with Intelligence–Open Platform) robots manufactured by Korean-based ROBOTIS. With a height of almost 18 inches (45 centimetres) they have twenty degrees of freedom and a 360 degree range of motion.
Information about the customization made by the made by the Autonomous Agents Lab and its vision processing algorithm is included in a paper by the human members of the team, Jacky Baltes, Chris Iverach-Brereton, Diana Carrier, and John Anderson. DARwIn is intended for humanoid robotis research and is no stranger to RoboCup. The University of Pennsylvania has won the Kid-sized Humanoid League with Team DARwin at RoboCup for the past three years and last year at its debut appearance the University of Manitobas's SnoBotsmade it to the second round of the competition with two wins, three losses, and a draw. It also finished in third place in the Technical Challenge. Earlier in 2013 SnoBots Jimmy and Jeff took first place in the kid-size division of the 2013 FIRA (Federation of International Robot-soccer Association) HuroCup, held in Kuala Lumpur, Malaysia.
Inaugurated in 1996 the FIRA cup is the longest running robot soccer competition and the HuroCup is among the most rigorous challenges for a humanoid robot. It comprises an octathalon that consists of a sprint, marathon, lift-and-carry, obstacle run, weight lifting, basketball free-throws, soccer penalty kicks, and a climbing wall. These collectively challenge a robotics team in a broad range of skills central to humanoid motion, complex motion planning, and human-robot interaction. In last year's event SnoBots came in first place in climbing, first place in weightlifting, second in United Soccer (where the robot must join with other competitors to form a soccer team), fourth in sprinting, and fifth in soccer penalty kicks and based on the score across all events were the overall winners This video from FIRA, shows Jimmy's prowess in ladder-climbing:
And here is his gold-medal winning lift:
Jimmy may only be a knee-high robot but he certainly seems to be capable. If only he could grown up to be an equally sprighly adult!
More InformationUniversity of Manitoba Autonomous Agents Laboratory The SnoBots: Jimmy, Jennifer and Jeff
Related Articles
Robot Soccer From The Robot's Point Of View Meet NimbRo-OP, Teen Size Open Source Robot Meet Justina Your Next Household Help
To be informed about new articles on I Programmer, install the I Programmer Toolbar, subscribe to the RSS feed, follow us on, Twitter, Facebook, Google+ or Linkedin, or sign up for our weekly newsletter.
Comments
or email your comment to: comments@i-programmer.info

|
|||
| Last Updated ( Sunday, 23 February 2014 ) |