| Exploring Edison - First Contact |
| Written by Harry Fairhead | ||||
| Friday, 12 June 2015 | ||||
Page 1 of 3 There is no avoiding the fact that if you are going to work with the Edison and get something special out of it then you are going to have to go native. In this installment of Exploring Edison, we get connected to Linux on both the Arduino and mini-breakout boards.
This is a chapter from our ebook on the Edison. The full contents can be seen below. Notice this is a first draft and a work in progress.
Now On Sale!You can now buy a print edition of Exploring Intel Edison.You can buy it from:
USA and World Amazon.com Chapter List
<ASIN:1871962447>
Which Breakout BoardAs explained in more detail in Choosing a Breakout Board, the Arduino breakout board isn't the lightest weight option for working with the Edison but it is very capable. It provides lots of I/O expansion, works with more familiar logic voltage levels and if you have a working knowledge of the Arduino there is very little extra to learn.
However, the Edison plus the Arduino breakout board isn't exactly an Arduino - it is more than an Arduino because it is a full Linux machine as well. So there are many new things to learn. The native mini-breakout board is harder to work with in some respects but it is the one you need to master to get the real Edison experience.
in this chapter of Exploring Edison we work through the ideas need to get started with the Arduino and the mini-breakout board. The mini-breakout board is the one that brings out the true nature of the Edision but the Arduino board is useful for checking that software works and gaining access to extended I/O without having to implement any special hardware. The HardwareSetting up the Edison with either of the Intel breakout boards is fairly straightforward and there isn't much that you have to do. Get the Edison and plug it into the breakout board. Fix it into place using the nuts provided if you don't plan to remove it often. For the Arduino board you can also screw in the plastic spacers if you really feel the need to. They only serve to lift the board up from the working surface. The next step is to find two USB cables (Micro B to A) or one USB cable and a power supply. When you are getting started it is probably easier to use the two USB cables as this powers the Edison and gives you access to its internal storage and other facilities. At this point the question arises of why two cables. The answer is that the breakout boards both have two USB connectors. One of the connectors - the one on the inside - is a true USB port. The other - the one on the edge - is a serial interface converted to be a USB port.
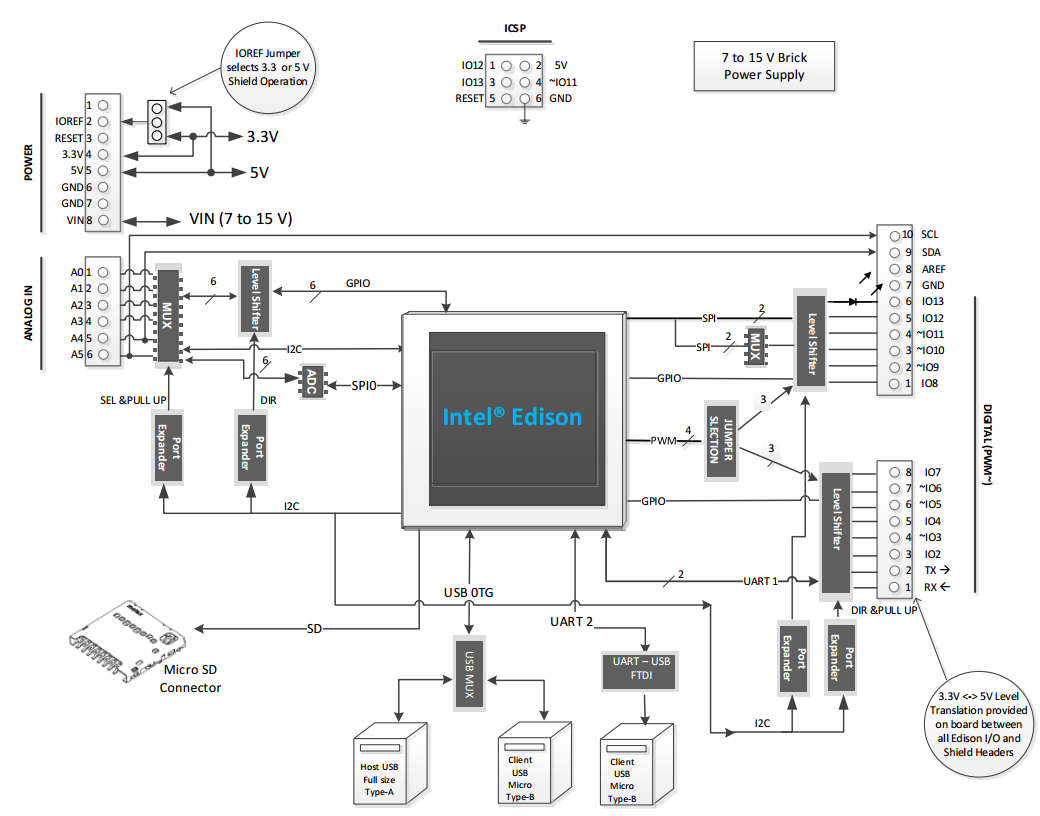
You can see the USB connections at the bottom of the block diagram on the Arduino breakout board.
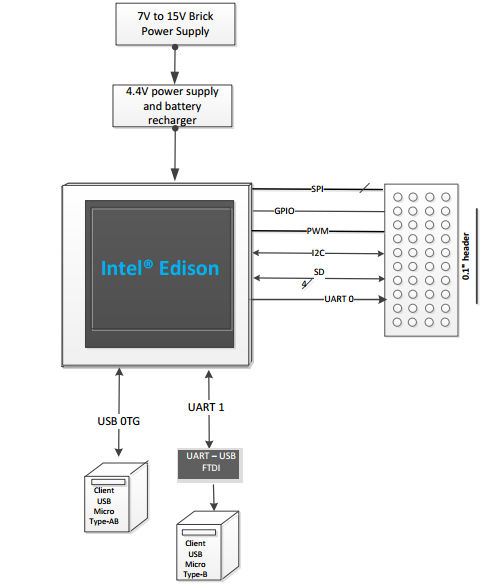
and the two USB connections on the mini-breakout board:
The true USB port can be used to power the system and it allow you to make a connection for doing things like downloading software and access the Edison's internal storage. The Serial USB port is used to connect a serial console so that you can "talk" to the Linux operating system. In practice you avoid using one of the two USB connections but when you are starting it is best to just make use of them for simplicity of getting started. The only thing you have to make sure of on the Arduino board is the position of the micro switch between the big USB A socket and the micro USB socket is pushed over towards the micro socket. The big A socket and the micro USB socket share the same USB port and the switch selects which one is active. The A socket allows the Edison to be a host and power and control other USB devices. The micro socket is always a client.
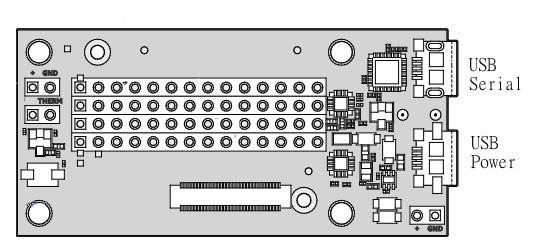
On the mini-breakout board the sockets are easy to find:
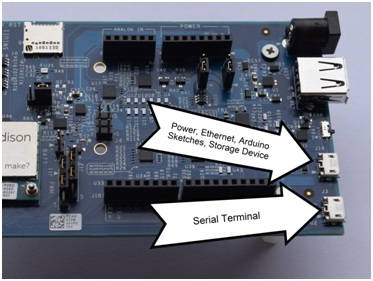
On the Arduino board they are also fairly obvious:
So all you have to do is plug two USB cables into the breakout board and into a suitable computer. If you do this you should see a green LED next to the Edison light up to indicate that power is on. Depending on the OS you are using various drivers may have been automatically installed or you may have install them manually. One thing that does get installed automatically on all systems is the Edison's internal drive. If everything is working you should be able to see an additional drive labeled "Edison" in what ever file manger you are using. Let's deal in detail with the serial port first and start talking to the on board Yocto Linux. At this stage you can more or less ignore the other USB socket and just treat it as a way of supplying power. You don't even have to install drivers for it until you want to make use of it. <ASIN:B00ND1KH42@COM> <ASIN:B00ND1KNXM> <ASIN:B00OPTSZN6@UK> |
||||
| Last Updated ( Sunday, 19 July 2015 ) |