| A New Paradigm for Robotic Dust Collection |
| Written by Harry Fairhead |
| Saturday, 01 April 2017 |
|
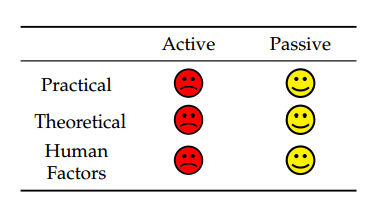
Carnegie Mellon researchers have discovered a new paradigm for robot vacuums, or robot dust collectors and they are more technically termed. The breakthrough is to let the dust come to them rather than have them chase after it which is good news for anyone tired of untangling their robot vacuum or irritated by the noise it makes banging its head against the furniture. The breakthrough couldn't be more timely: the increased cost of legal human labor, and increased penalties for employing illegal immigrants, has made dust-collection all the more critical to automate The researchers, Rachel Holladay and Siddhartha S. Srinivasa of the Robotics Institute Carnegie Mellon University claim in their paper included in archiv.org, that the new robots are: (1) Practical: Because they have no moving parts like wheels or motors, they are both inexpensive and incur no wear and tear, (2) Theoretical: because passive dust-collectors can be trivially parallel transported to the identity element of the SE(2) Lie Group, they require no explicit motion planning (in situations where parallel transport is inefficient, the robot can be physically transported to the identity element), (3) Human Factors: as passive dust-collecting robots are identical to other passive elements in our homes and work places (like walls, tables, desks, lamps,carpets), their adoption into our lifespace is seamless. The mathematical model used to demonstrate the effectiveness of the new approach starts, reasonably enough, with the stress energy tensor of the Einstein field equation, which is normally used to model dust clouds:
From here an elegant analysis leads to the expressions for active and passive dust collection and to the key theorem: Theorem 1. The dust-collecting capability of a passive robot exceeds the dust-collecting capability of an active robot when:
It also seems that part of the proof has applications to Hawking black hole radiation - where else does all the dust under the bed come from? A user study quickly confirmed that static dust collectors are often the users preferred choice: ”I’ve observed that the stuff that collects the most dust in my place are the items that are static, therefore I would assume that the static robot might collect more dust.” But a majority were in favour of active robots: For every supporter of passive robots, there were still more who argued for active robots. Almost every person, in explaining their choice, argued that active robots, due to their mobility, would be able to cover a larger space. This highlights the dichotomy between efficiency and coverage. A field study followed and this found that: "Of the 261 robots listed on the census1 with complete information, we see that none of them are designed to collect dust actively. However, we can assume many of them collect dust passively. Twenty were listed as having no mobility, making them official passive dust collecting robots. Even the eighty-six robots that have wheeled mobility are unlikely to be driving most of the time and therefore spend much of their life as passive dust collecting robots. " The conclusion makes interesting and vital reading: "This work also aims to highlight the underappreciated advantages of passive dust collecting robots. Passive robots, unconstrained by a need for explicit dust collecting capabilities, afford a wide range of morphologies. This allows for incredibly flexibility in designing the possible human-robot interaction schemes, which is critical to a cleaning robots acceptance"
We hope that this work will be taken up very soon by the top companies in robot dust collecting. Until then I can only suggest that if you have some electronics experience then opening the cover and cutting the cables going to the motors is your best upgrade option. It currently isn't clear if the field equation generalizes to robot mowing machines that predominantly work on lawns. Clearly more work is needed. More InformationA New Paradigm for Robotic Dust Collection: Theorems, User Studies, and a Field Study Related ArticlesSelf Parking Chairs - Office Utopia Robowow - Mows, Vacs And Cleans Your Pool Live the Life of a Robot Vacuum Cleaner
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Twitter, Facebook or Linkedin. 
Comments
or email your comment to: comments@i-programmer.info
|
| Last Updated ( Friday, 31 March 2017 ) |