| Jerboas, Information & Hopping |
| Written by Mike James | |||
| Saturday, 09 September 2017 | |||
|
If you have wheels then getting stuck in desert sand is easy, but bipedal rodents have an interesting approach to the problem.
This is as much a story about evolution, information theory and predator-prey dynamics as it is about robots but this is the spin that the original researchers are putting on it. It all starts when it became clear that the desert jerboa doesn't run like other animals. Mostly we adopt a gait and just keep going, and usually the gait is determined by the speed - horses walk, then trot then gallop. The jerboa on the other hand seems to change its gait, hopping, skipping and running, every time it moves? Could there be a pattern buried in the seemingly random nature and why does it do it? For some of the answers, see the following video:
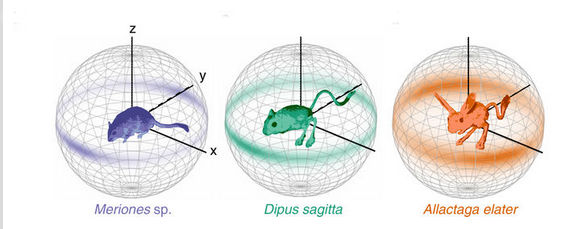
Comparing the directions that a quadruped and a bipedal rodent take reveals that the bipedal rodents do have a higher entropy - put simply they hop all over the place. The following chart from the paper makes this quite clear.
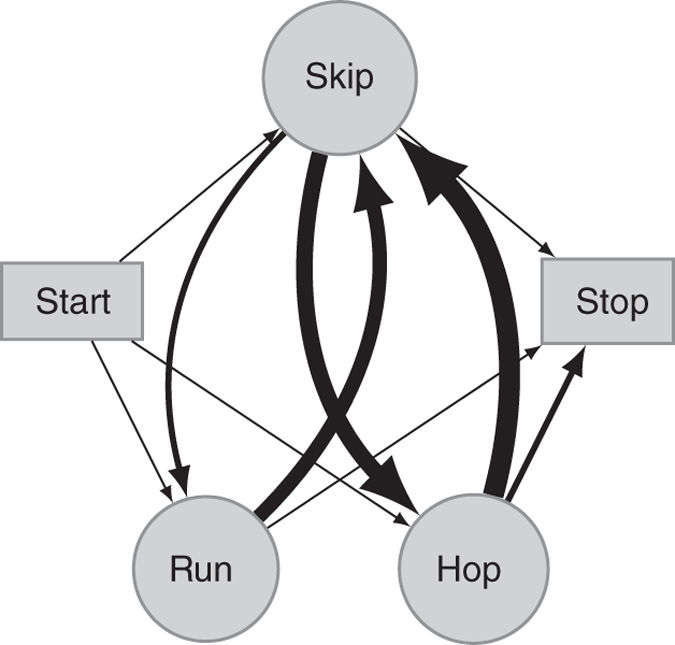
The first is the quadrupedal jird and the next two are bipedal jerboas. You can see the the jird tends to go in the same direction, but the jerboas' directions are much more evenly distributed. A state diagram also gives you and idea of how much structure there is in the behavior. The thickness of the arrows gives you an idea of the probability of a state transition. Notice that starting moves to hop, skip or run with nearly equal probability, but there is a marked preference to stop on a hop and to move from a hop to a skip.
The paper goes on to explain that it seems that that the higher entropy is all about avoiding being eaten. If you tend to follow a low entropy path, then it is easier for a predictor to predict where you will be in a few milliseconds and so easier to pick you off. The jerboas do seems not to run for cover as much as the jird when there is a mock predator in the environment. Why is it that bipedal locomotion is a good choice for high entropy paths? Couldn't a quadrupedal animal achieve the same level of unpredictability? Probably, but you can see that the "ricochet" style of hopping lends itself to high entropy. Given that this behavior evolved it is also interesting to question its cost. Do bipedal high entropy motions require more neuronal computation? You would think so, but compare the motion of the jerboa with that of a drone that navigates by crashing into things, see GimBall - a Crash-Happy Robot . Maybe the jerboa isn't as accurate, skillful or calculating in its locomotion as it appears. Perhaps it really does simply ricochet off the environment in something that is just a losely controlled series of leaps into the unknown.
More InformationRelated Articles
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on Facebook or Linkedin.

Comments
or email your comment to: comments@i-programmer.info
|
|||
| Last Updated ( Saturday, 09 September 2017 ) |