SLAM simultaneous localization and mapping is a key robot technique - and its a tough problem. Google has just released open source Cartographer, a real-time simultaneous localization and mapping (SLAM) library in 2D and 3D with ROS Robot Operating system support. The Google Open Source Blog explains it like this:
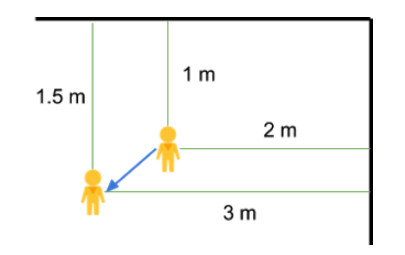
SLAM algorithms combine data from various sensors (e.g. LIDAR, IMU and cameras) to simultaneously compute the position of the sensor and a map of the sensor’s surroundings. For example, consider this approach to drawing a floor plan of your living room:
Grab a laser rangefinder, stand in the middle of the room, and draw an X on a piece of paper.
Measure the distance from where you’re standing to any wall.
Draw a line on the paper where the wall is and write down the distance between the X (your position) and the wall.
Measure the distance from where you’re standing to another wall and add it to the drawing as well.
Now, move to another part of the room.
Since the walls (hopefully) haven’t moved, you can measure your distance to the same two walls to determine your new position.
The following video is a demonstration of Cartographer’s real-time loop closure:
A detailed description of Cartographer’s 2D algorithms can be found in the ICRA 2016 paper.
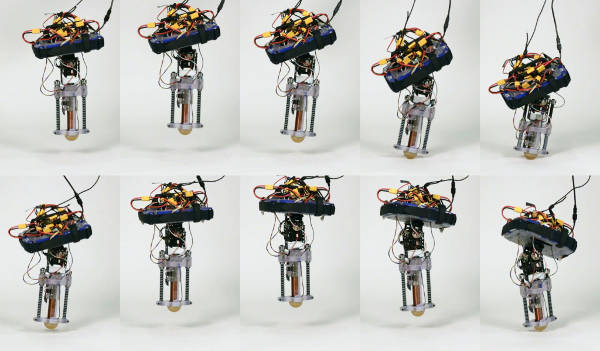
As far as a robot is concerned two legs are bad and four legs are good, well more stable at least. Now Disney has a one-legged hopping robot that proves that things are better on both sides of bipedal. It isn't quite there yet, but it is fun to watch:
"Current and previous single-legged hopping robots are energetically tethered and lack portability. Here, we present the design and control of an untethered, energetically autonomous single-legged hopping robot. The thrust-producing mechanism of the robot’s leg is an actuated prismatic joint, called a linear elastic actuator in parallel (LEAP). The LEAP mechanism comprises a voice coil actuator in parallel with two compression springs, which gives our robot passive compliance. An actuated gimbal hip joint is realized by two standard servomotors. To control the robot, we adapt Raibert’s hopping controller, and find we can maintain balance roughly in place for up to approx. 7 seconds (19 hops) while continuously hopping."
The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016) held in Daejeon, Korea has just come to a close and we missed showing you the promo videoin advance. But while we wait for more reports of exciting things from the conference, here it is:
Supabase has released Vector Buckets, specialized storage containers optimized for vector data. This is welcome as it expands your options for storing vectors.
AI is a complex beast, but it is based on some very simple and very powerful ideas that deserve to be better known as they throw much light not only on the way AI works but on the way the universe wor [ ... ]